Sensory Additions:
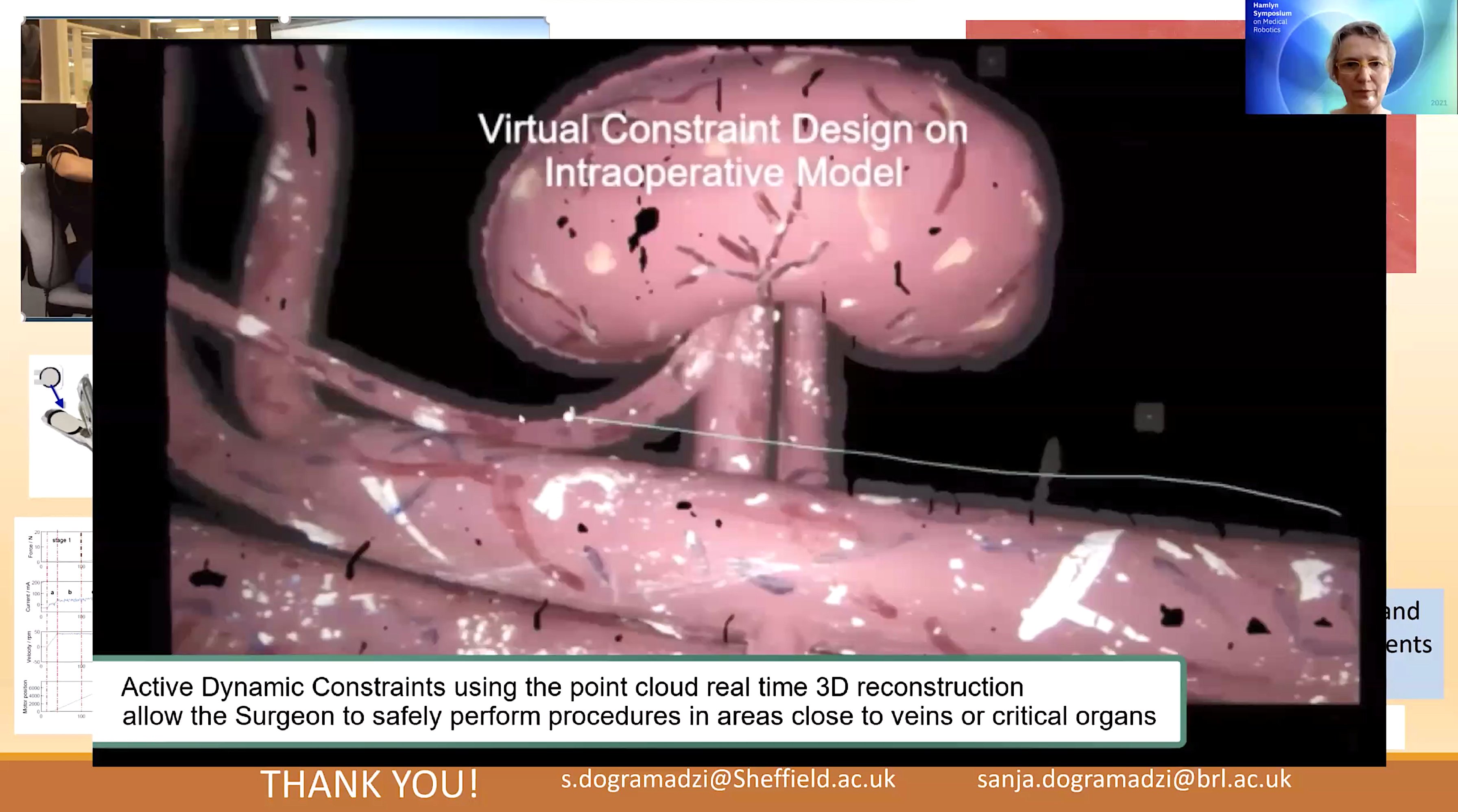
• 3D Vision system for inspecting the surgical field.
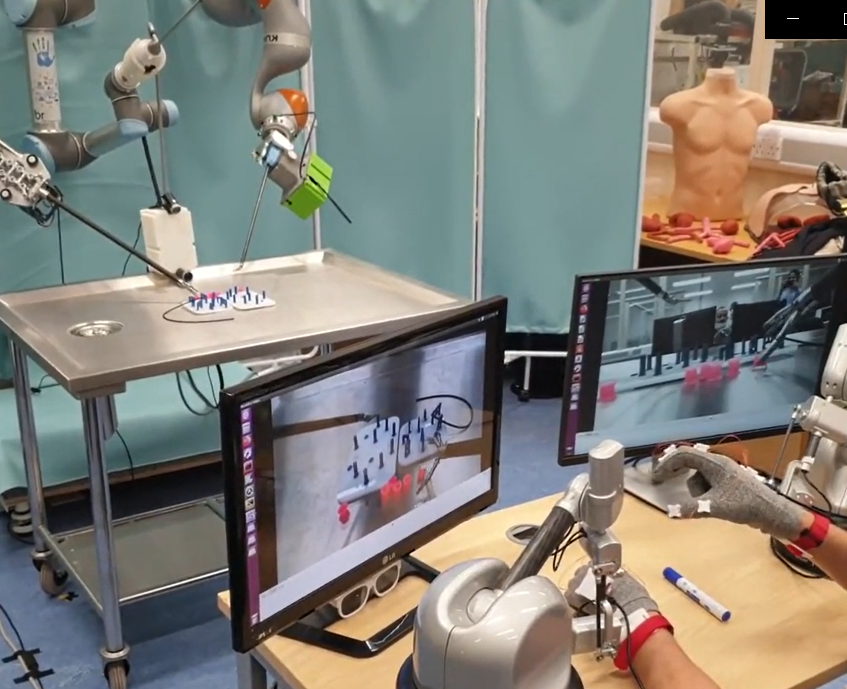
• RGBD sensor monitoring the surgeon side.
• Sensor-less force detection of tissue grasping.
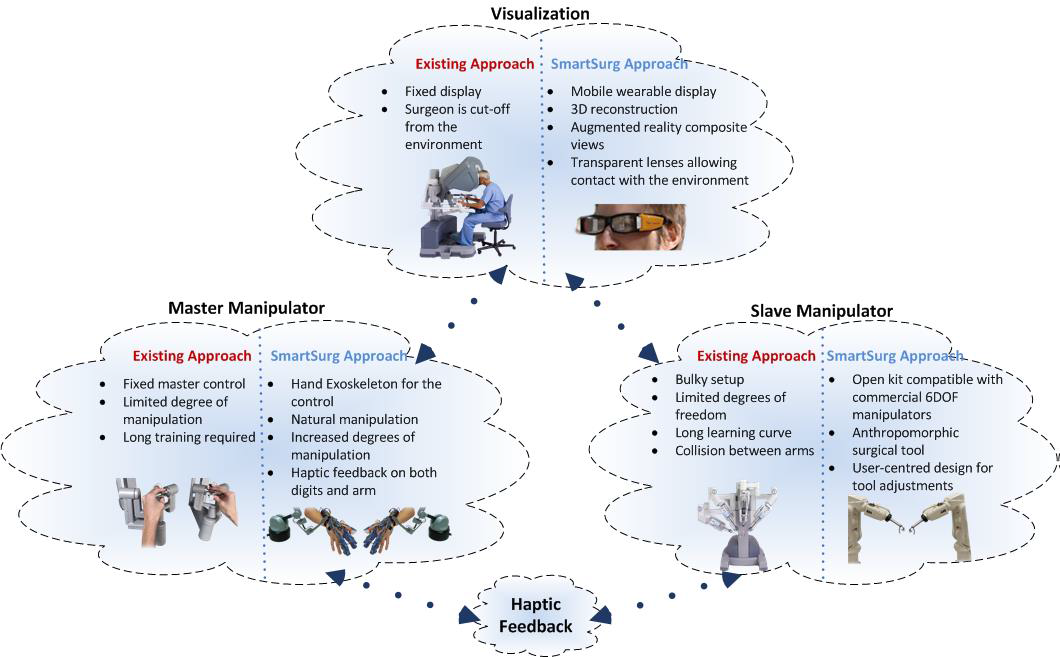
Master Manipulator Additions:
• A hand exoskeleton for better tissue manipulation and grasping and an extended multi-DOF shaft for better dexterity inside the abdomen interfaced with Haption Virtuose 6D, and Cybernetix Real Time 3D supervision software managing the haptic force-feedback between the slave and the master exoskeleton.
• Wearable smart glasses for augmented reality guidance of the surgeon.
Slave Manipulator Additions:
• An anthropomorphic multi-digit surgical instrument with universal usability designed for the diverse considered use-cases integrated with a 6DOF manipulator for gross positioning at the surgical site.