Journal publications:
- Morad S., Jaffer Z., Dogramadzi S., “Design of a Wearable Fingertip Haptic Device: Investigating Materials of Varying Stiffness for Mapping the Variable Compliance Platform”, Journal of Medical Robotics Research URLNovember 2021
- Sani M., Ascione R., Dogramadzi S., “Mapping Surgeons Hand/Finger Movements to Surgical Tool Motion During Conventional Microsurgery Using Machine Learning”, Journal of Medical Robotics Research URLOctober 2021
- Su H., Qi W., Li Z., Chen Z., Ferrigno G., De Momi E., “Deep Neural Network Approach in EMG-Based Force Estimation for Human–Robot Interaction”, IEEE Transactions on Artificial Intelligencevol. 2, no. 5, pp. 404-412, Oct. 2021 URLOctober 2021
- Ovur S. E., Zhou X., Qi W., Zhang L., Hu Y., Su H., Ferrigno G., De Momi E., “ A novel autonomous learning framework to enhance sEMG-based hand gesture recognition using depth information”, Biomedical Signal Processing and Control, Volume 66, 102444URLApril 2021
- Su H.,Mariani A., Ovur S. E., Menciassi A., Ferrigno G., De Momi E.,“ Toward Teaching by Demonstration for Robot-Assisted Minimally Invasive Surgery”, IEEE Transactions on Automation Science and Engineering, vol. 18, no. 2, pp. 484-494URLApril 2021
- Ovur S. E., Su H., Qi W., De Momi E., Ferrigno G., “Novel Adaptive Sensor Fusion Methodology for Hand Pose Estimation With Multileap Motion”, IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1-8, 2021, Art no. 9507108URLMarch 2021
- Capace A., Cosentino C., Abidi H., Cannella F., Amato F., Dogramadzi S., Merola A., “Modelling and identification of the asymmetric hysteresis in the viscoelastic response of the fingertip under indentation: A multistate friction model with switching parameters”, Mechatronics URLAugust 2021
- Su H., Hu Y., Karimi H.R., Knoll A., Ferrigno G., De Momi E. “Improved recurrent neural network-based manipulator control with remote center of motion constraints: Experimental results”, Neural Networks, Volume 131, Pages 291-299URLNovember 2020
- Su H., Qi W., Hu Y., Karimi H. R., Ferrigno G., De Momi E.,“An Incremental Learning Framework for Human-Like Redundancy Optimization of Anthropomorphic Manipulators”, IEEE Transactions on Industrial Informatics, Volume: 18, Issue: 3URLNovember 2020
- Su H., Schmirander Y., Valderrama-Hincapie S.E., Pinedo J., Zhou X., Li J., Zhang L., Hu Y., Ferrigno G., De Momi E.,“Asymmetric Bimanual Control of Dual-arm Serial Manipulator for Robot-assisted Minimally Invasive Surgeries”, Sensors and Materials, Volume 32, Number 4(1)URLApril 2020
- Zhou X., Qi W., Ovur S.E., Zhang L., Hu Y., Su H., Ferrigno G., De Momi E.,“A novel muscle-computer interface for hand gesture recognition using depth vision”, Journal of Ambient Intelligence and Humanized Computing, volume 11, pages 5569–5580 URLMarch 2020
- Su H., Qi W., Yang C., Aliverti A., Ferrigno G., De Momi E., “Deep Neural Network Approach in Human-Like Redundancy Optimization for Anthropomorphic Manipulators”, IEEE Access, vol. 7, pp. 124207-124216 PDFAug 2019
- Su H., Qi W, Hu Y., Sandoval J., Zhang L., Schmirander Y., Chen G., Aliverti A., Knoll A., Ferrigno G., De Momi E., “Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network”, Sensors 2019, 19(17), 3636 PDFAug 2019
- Su H., Yang C., Mdeihly H.,Rizzo A., Ferrigno G., De Momi E., “Neural Network Enhanced Robot Tool Identification and Calibration for Bilateral Teleoperation”, IEEE Access, vol. 7, pp. 122041-122051, 2019 PDFAug 2019
- Cheng Z., Dall'Alba D., Foti S., Mariani A., Chupin T., Caldwell G. D., Ferrigno G., De Momi E., Mattos S. L., Fiorini P.,“Design and Integration of Electrical Bio-impedance Sensing in Surgical Robotic Tools for Tissue Identification and Display”, J Front. Robot. AI URLJuly 2019
- Abeywardena S., Yuan Q., Tzemanaki A., Psomopoulou E., Droukas L., Melhuish C., Dogramadzi S., “Estimation of Tool-Tissue Forces in Robot-Assisted Minimally Invasive Surgery Using Neural Networks”, Frontiers in Robotics and AI, 5:56, July 2019 PDFJuly 2019
- Nakawala H., De Momi E., Tzemanaki A, Dogramadzi S., Russo A., Catellani M., Bianchi R., de Cobelli O., Sideridis A., Papacostas E., Koupparis A., Rowe E., Persad R., Ascione R., Ferrigno G., “Requirements elicitation for robotic and computer-assisted minimally invasive surgery”, International Journal of Advanced Robotic Systems, July-August 2019: 1–32 PDFJuly 2019
- Su H., Yang C., Ferrigno G., De Momi E., “Improved Human–Robot Collaborative Control of Redundant Robot for Teleoperated Minimally Invasive Surgery”, IEEE Robotics and Automation Letters URLFeb 2019
- Nakawala H., Bianchi R., Pescatori LE., De Cobelli O., Ferrigno G., De Momi E., ““Deep-Onto” network for surgical workflow and context recognition”, International Journal of Computer Assisted Radiology and Surgery URLNov 2018
- Tzemanaki A., Anil A l G., Melhuish C. and Dogramadzi S, “ Design of a Wearable Fingertip Haptic Device for Remote Palpation: Characterisation and Interface with a Virtual Environment ”, Front. Robot. AI 5:62 PDFJune 2018
- J. Buzzi, E. De Momi and I. Nisky, “An uncontrolled manifold analysis of arm joint variability in virtual planar position and orientation tele-manipulation”, IEEE Transactions on Biomedical Engineering URLMay 2018
- Nakawala H, Ferrigno G, De Momi E., “Development of an intelligent surgical training system for Thoracentesis”, Artificial Intelligence in Medicine, 1-14 PDFJanuary 2018
- Penza, V., De Momi, E., Enayati, N., Chupin, T., Mattos, L. S., “enVisors: enhanced Vision system for robotic surgery. a User-Defined safety Volume Tracking to Minimize the risk of intraoperative Bleeding”, Enhanced Vision System for Robotic Surgery, 4(4) PDFMay 2017
- Buzzi, J., Gatti, C., Ferrigno, G., & De Momi, E., “Analysis of joint and hand impedance during teleoperation and free-hand task execution”, IEEE Robotics and Automation Letters, 2(3), 1733-1739 URLMarch 2017
- Enayati N, Ferrigno G, De Momi E. “Performance metrics for guidance active constraints in surgical robotics”, The International Journal of Medical Robotics and Computer Assisted Surgery, e1873 PDFNovember 2017
- Enayati, N., Ferrigno, G. & De Momi, E. “Skill-based human–robot cooperation in tele-operated path tracking”, Autonomous robots URLNovember 2017
- Buzzi J., Jansma J., Ferrigno G., De Momi E. “On the value of estimating human arm stiffness during virtual teleoperation with robotic manipulators”, Frontiers in Neuroscience, Neural Technology, Special issue: Biomechatronics: Harmonizing Mechatronic Systems with Human Beings. 528(11) PDFSeptember 2017
Conference publications:
- Sani M., Ochoa M., Dogramadzi S.,“Palm Reading: Using Palm Deformation for Fingers and Thumb Pose Estimation”, 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO)PDFDecember 2019
- Vasilkovski M., Ovur S.E., De Momi E., Ferrigno G.,“Tissue Deformation Tracking in Robot-Assisted Nephrectomy”, Italian Robotics and Intelligent Machines (I-RIM) ConferencePDFOctober 2019
- Fattahi Sani M., Abeywardena S., Psomopoulou E., Ascione R., Dogramadzi S., “Towards Finger Motion Tracking and Analyses for Cardiac Surgery”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham PDFSeptember 2019
- Ovur S.E., Cobanaj M., Vantadori L., De Momi E., Ferrigno G., “Surgeon Training with Haptic Devices for Computer and Robot Assisted Surgery: An Experimental Study”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Zampokas G., Tsiolis K., Peleka G, Kyniazopoulou A.T., Mariolis I., Malasiotis S. and Tzovaras D., “Augmented Reality Toolkit for a Smart Robot-Assisted MIS Platform”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Abeywardena S., Psomopoulou E., Sani M.F., Tzemanaki A., Dogramadzi S., “Control of a da Vinci EndoWrist Surgical Instrument Using a Novel Master Controller”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Nakawala H., De Momi E., Bianchi R., Catellani M., De Cobelli O., Jannin R., Ferrigno G., Fiorini P., “Toward a Neural-Symbolic Framework for Automated Workflow Analysis in Surgery”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Kastritsi T., Sarantopoulos I., Stavridis S., Papageorgiou D., Doulgeri Z., “Manipulation of a Whole Surgical Tool Within Safe Regions Utilizing Barrier Artificial Potentials”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Psomopoulou E., Persad R., Koupparis A., Abeywardena S., Sani M.F, Melhuish C., Dogramadzi S., “Evaluation of Force Feedback for Palpation and Application of Active Constraints on a Teleoperated System”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Papadopoulos C., Topalidou-Kyniazopoulou A., Mariolis I., Sideridis A., Papacostas E., Tzovaras D., “A Knowledge-Based Graphical Interface for Modeling Surgical Workflows in Robot-Assisted Minimally Invasive Surgery”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Catellani M., Cordima G., de Cobelli O., Papasoulis E., Papacostas E., Sideridis A., Peleka G., Zampokas G., Tsiolis K., Kyniazopoulou A.T., Mariolis I. Malasiotis S., Tzovaras D. “Augmented and Virtual Reality in Minimally Invasive Surgery, State of the Art and Future Prospects”, In: Henriques J., Neves N., de Carvalho P. (eds) XV Mediterranean Conference on Medical and Biological Engineering and Computing - MEDICON 2019. IFMBE Proceedings, vol 76. Springer, Cham URLSeptember 2019
- Kastritsi T., Papageorgiou D., Sarantopoulos I., Stavridis S., Doulgeri Z., Rovithakis G. “Guaranteed Active Constraints Enforcement on Point Cloud-approximated Regions for Surgical Applications”, 2019 International Conference on Robotics and Automation (ICRA) URLMay 2019
- Kastritsi T., Papageorgiou D., Sarantopoulos I., Doulgeri Z., Rovithakis G. “Stability of Active Constraints Enforcement in Sensitive Regions Defined by Point-Clouds for Robotic Surgical Procedures”, 2019 European Control Conference (ECC) PDFMay 2019
- Peleka G., Zampokas G., Mariolis I., Malasiotis S.,“Intra-Operative 3D Registration of MIS Reconstructed Surfaces to Pre-Operative Models”,2018 IEEE International Conference on Imaging Systems and Techniques PDFOctober 2018
- Zampokas G., Tsiolis K., Peleka G., Mariolis I.,“Real-Time 3D Reconstruction in Minimally Invasive Surgery with Quasi-Dense Matching”,2018 IEEE International Conference on Imaging Systems and Techniques PDFOctober 2018
- Su H., Ferrigno G., De Momi E.,“Adaptive Decoupling Control of a Serial Redundant Robot for Teleoperated Minimally Invasive Surgery”, International Conference on Robotics and Automation - ICRA Workshop on Supervised Autonomy in Surgical Robotics, At Brisbane, Australia PDFMay 2018
- Su H., Sandoval J., Makhdoomi M., Ferrigno G., De Momi E.,“Safety-enhanced Human–Robot Interaction Control of Redundant Robot for Teleoperated Minimally Invasive Surgery”, International Conference on Robotics and Automation - ICRA Workshop on Supervised Autonomy in Surgical Robotics, At Brisbane, Australia PDFMay 2018
- Tzemanaki, A., Abeywardena S., Psomopoulou E., Melhuish C. and Dogramadzi, S., “Using current measurement to estimate palpation and grasping forces in robot-assisted minimally invasive surgery”, In the proceedings of Computer/ Robot Assisted Surgery CRAS 2018 PDF2018
- Sayyaddelshad I., Psomopoulou E., Abeywardena S., Tzemanaki A. and Dogramadzi, S., “Incision Port Displacement Modelling Verification in Minimally Invasive Surgical Robots”, In the proceedings of Computer/ Robot Assisted Surgery CRAS 2018 PDF2018
- Vantadori L., Mariani A., Chupin T., De Momi E., Ferrigno G., “Design and Evaluation of an Intraoperative Safety Constraints Definition and Enforcement System for Robot-Assisted Minimally Invasive Surgery”, In the proceedings of Computer/ Robot Assisted Surgery CRAS 2018 PDF2018
- Foti S., Mariani A., Chupin T., Dall’Alba D., Cheng Z., Mattos L., Caldwell D., Fiorini P., De Momi E., Ferrigno G., “Advanced User Interface for Augmented Information Display on Endoscopic Surgical Images”, In the proceedings of Computer/ Robot Assisted Surgery CRAS 2018 PDF2018
- Morelli A., Moccia S., S. Mattos L., Cordima G., De Cobelli G., Ferrigno G, De Momi E., “Towards Deformable Registration for AR in Nephrectomy", VI National Congress of Bioengineering” PDF2018
- Kastritsi T., Papageorgiou D., Doulgeri Z., “On the Stability of Robot Kinesthetic Guidance in the Presence of Active Constraints”, European Control Conference (ECC 18), Limassol, CyprusPDF June 2018
- Nakawala H., De Momi E., Pescatori L.E., Morelli A., Ferrigno G., “Inductive learning of surgical workflow model through video annotations”, In the proceedings of 30th IEEE International Symposium on Computer-Based Medical Systems (CBMS), Thessaloniki, Greece PDF 2017
- Penza V, De Momi E., Enayati N., Chupin T., Ortiz J., S. Mattos L., "Safety Enhancement Framework for Robotic Minimally Invasive Surgery”, In the proceedings of the 10th Hamlyn Symposium on Medical Robotics, London, UK PDF 2017
- Buzzi J., De Momi E., Ferrigno G., Nisky I., “Arm joint angle variability analysis in virtual robotic teleoperation with two master devices”, ICRA 2017 Workshop on Innovative Haptic Interfaces emerging from Soft Robotics, Singapore PDF June 2017
- Snayati N., Chupin, T., De Momi E., Ferrigno G., “An augmented reality framework for surgical teleoperation performance enhancement and training”, CRAS 2017 - 7th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery, 2017, Montpellier, France 2017
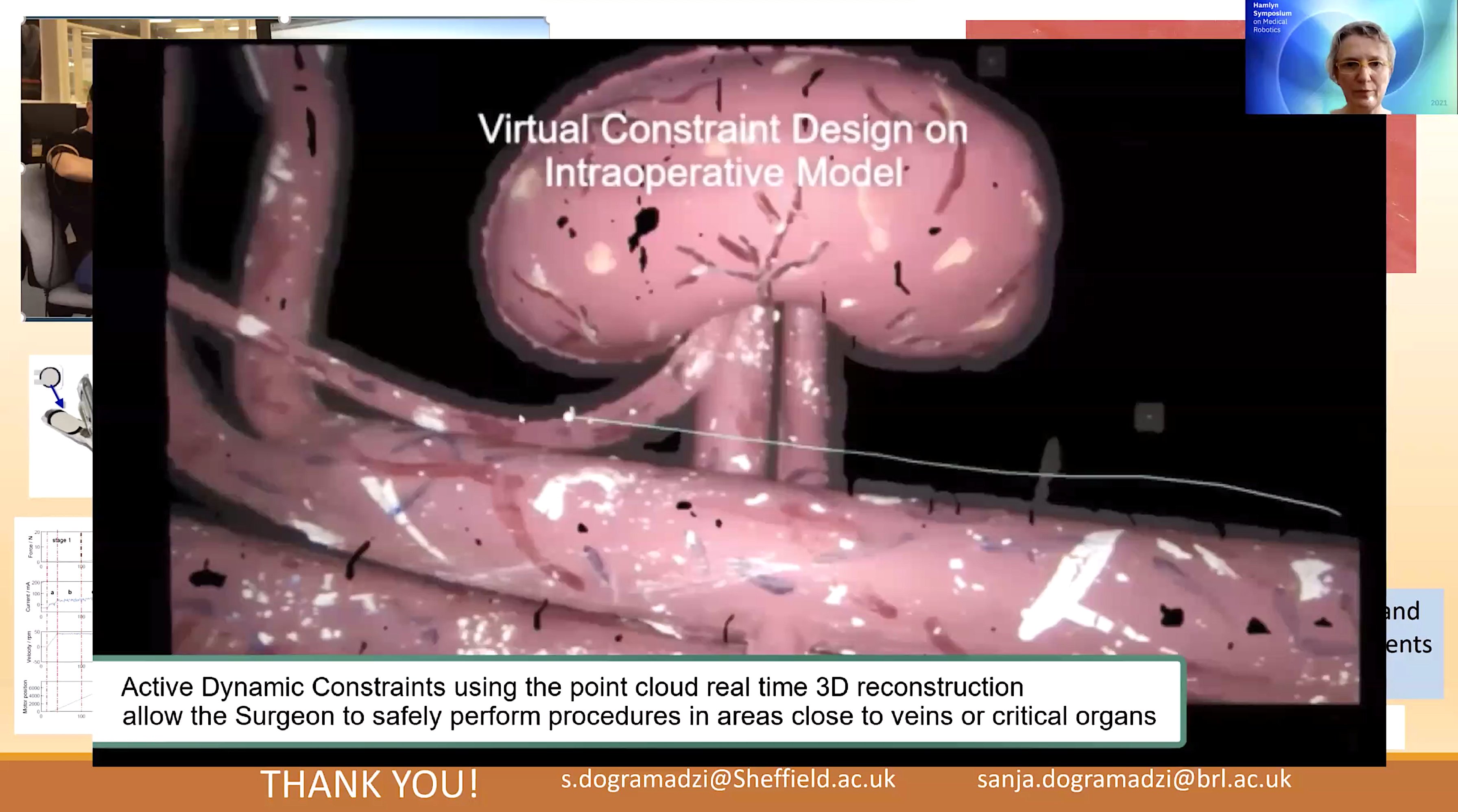
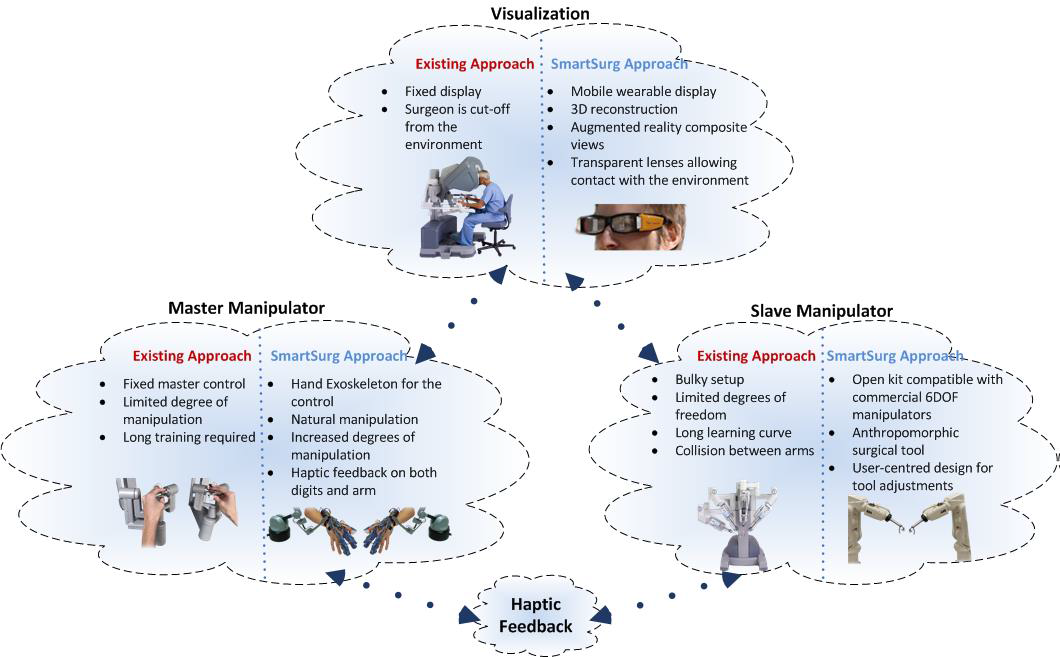
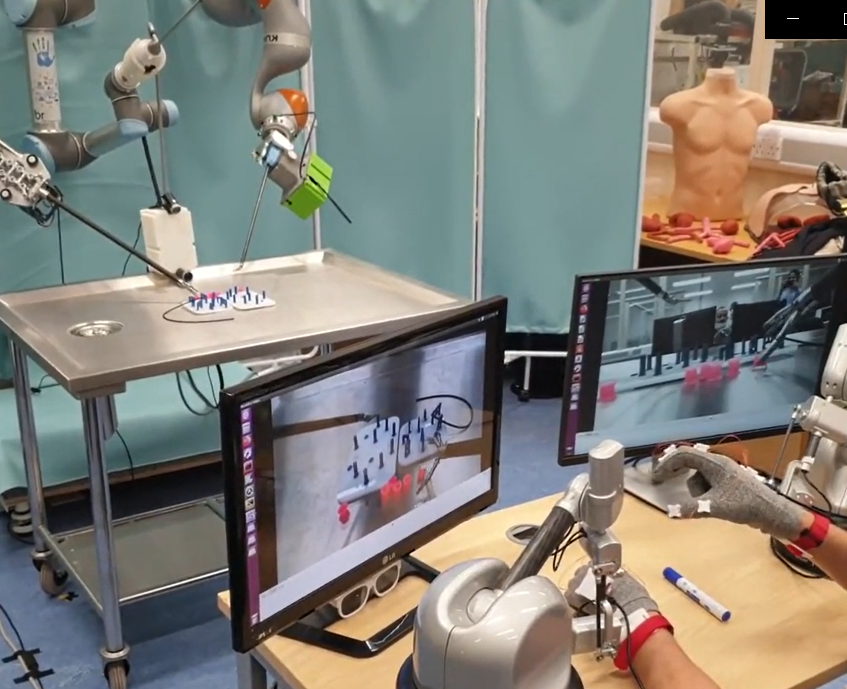
Trials on SMARTsurg Robot-Assisted Minimally Invasive Surgery demo unit
The SMARTsurg Team has designed and built a Robot Assisted Minimally Invasive Surgery demo unit. The project incorporates key novelties / advances for the next generation of surgical robotics: • The perception of “feeling” the instrument in the hands is restore back to the Surgeons via the development of highly dexterous anthropomorphic surgical instruments and wearable hand exoskeleton with haptic feedback. • Active Dynamic Constraints using point cloud real time 3D reconstruction and wearable smart glasses for augmented reality allow the Surgeon to safely perform procedures in areas close to veins or critical organs. The SMARTsurg demo unit has been evaluated by Surgeons for oncological, cardio-vascular and orthopedic procedures.- D1.2: Ethics and Safety manual for SMARTsurg Technologies pdf March 2017
- D2.1: End user requirements, use cases and application scenarios pdf July 2017
- D3.1: On-the-fly 3D reconstruction of the surgical field pdf June 2018
- D3.3: Augmented Reality Composite View Creation and Visualisation pdf June 2018
- D3.4: Wearable surgical system demonstration pdf June 2018
- D4.3: Clip-on Tool Interchangeability System Concept pdf June 2018
- D5.1: Dynamic active constraint construction pdf June 2018
- D5.3: Report on Haptic feedback system development pdf June 2018
- D7.2: Website and Social Media Presence Launch pdf March 2017